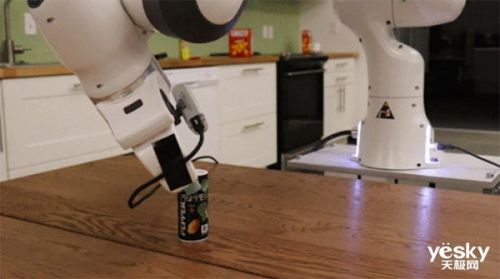
如果机器人要拿起一个物体并将其放进一个容器里。首先,机器人需要观察物体,在6D空间中决定抓取器的移动位置。需要注意的是,抓取成功与否还取决于物体和夹具的几何形状、物体质量分布以及表面摩擦力,这对于机器人来说实现起来是非常困难的。
据外媒报道,来自英伟达的研究人员开发了一种名为6-DoF GraspNet的新算法,可以让机器人抓取任意物体。据了解,6-DoF GraspNet工作原理如下:
机械手观察物体并决定在6D空间(空间中的x、y、z坐标平面和旋转三维空间)中的移动路径。该算法的设计方式是生成一组可能的握持器并根据需求进行移动。然后整个握持器通过一个“握持评价器”运行,该评价器会为每个可能的握持分配一个分数。最后握持评价器通过局部变换调整握持变量进而提高最佳握持的成功率。
值得一提的是,研究人员并没有选择深度学习的方法,而是选择了“综合训练数据”。事实上,基于深度学习的方法通常需要多个机器人收集数天或数月的数据,以获得足够的数据来训练模型。而6-DoF GraspNet使用的则是综合训练数据。它由三维对象模型和模拟的抓取体验组成。对于每个对象,使用几何启发式生成抓取假设,并使用NVIDIA FleX物理引擎进行评估。

研究人员表示,6-DoF GraspNet的优势包括:1、它可以用来抓取任意物体;2、它的模块化,这使得它可以用于各种计算机视觉应用和运动规划算法;3、它可以跟一个模型一起使用,该模型可根据各种物体的“点云”来分配形状,而这将能确保机械臂不会跟任何障碍物相撞。
机器人的抓取一直是国内外研究的重点,这也印证了解决这个问题对整个机器人技术发展的重要意义。相信,随着技术的不断完善,人类的双手可以将在更多的场景中得到解放。